Hi, I'm Angel Romero Aguilar
I am a researcher in Artificial Intelligence and Optimal Control at Institute of Informatics, University of Zurich
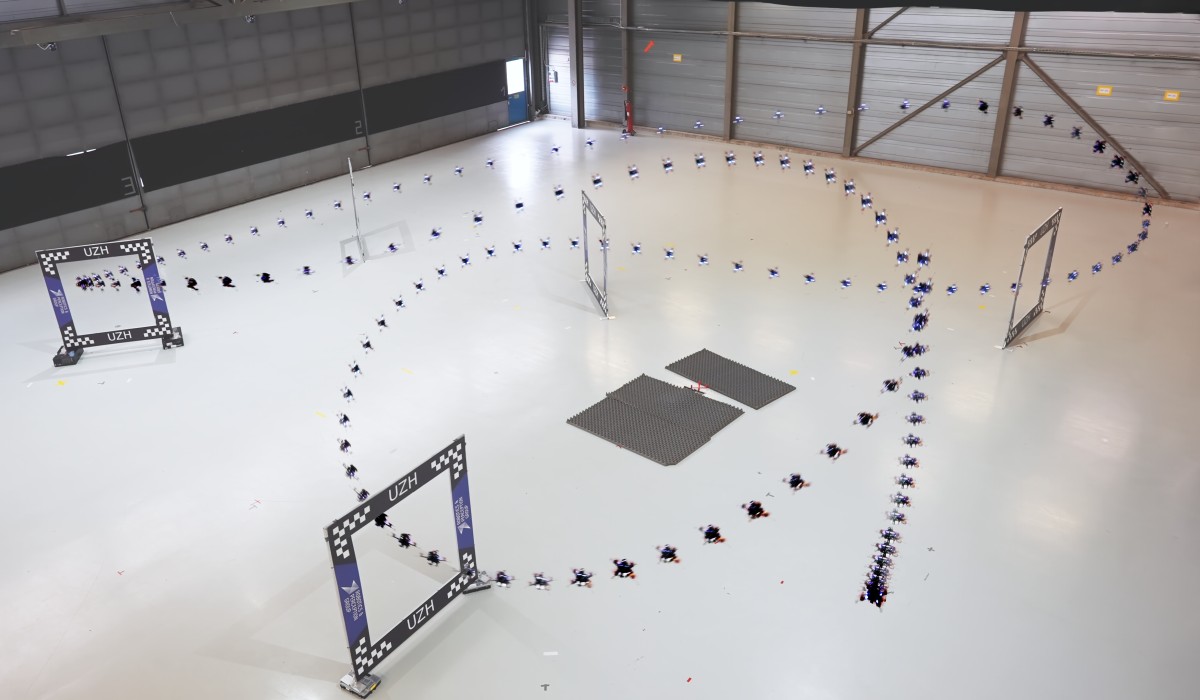
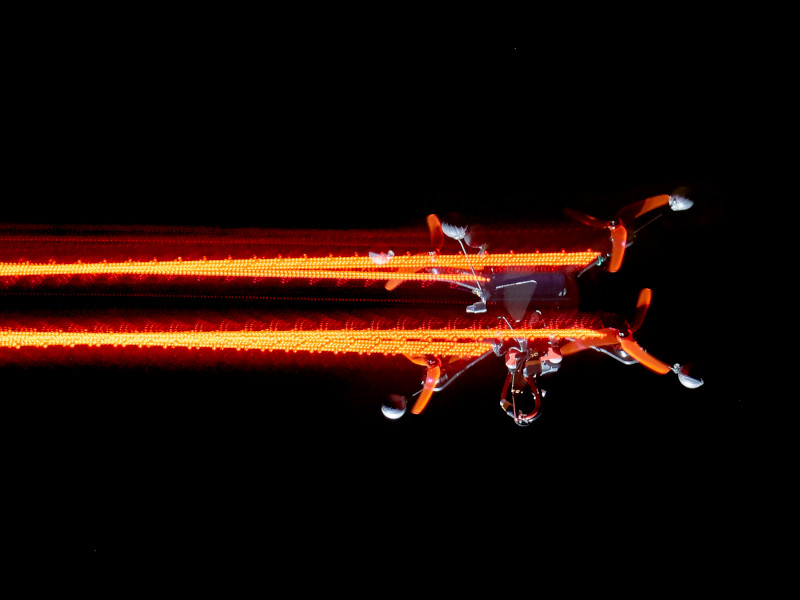
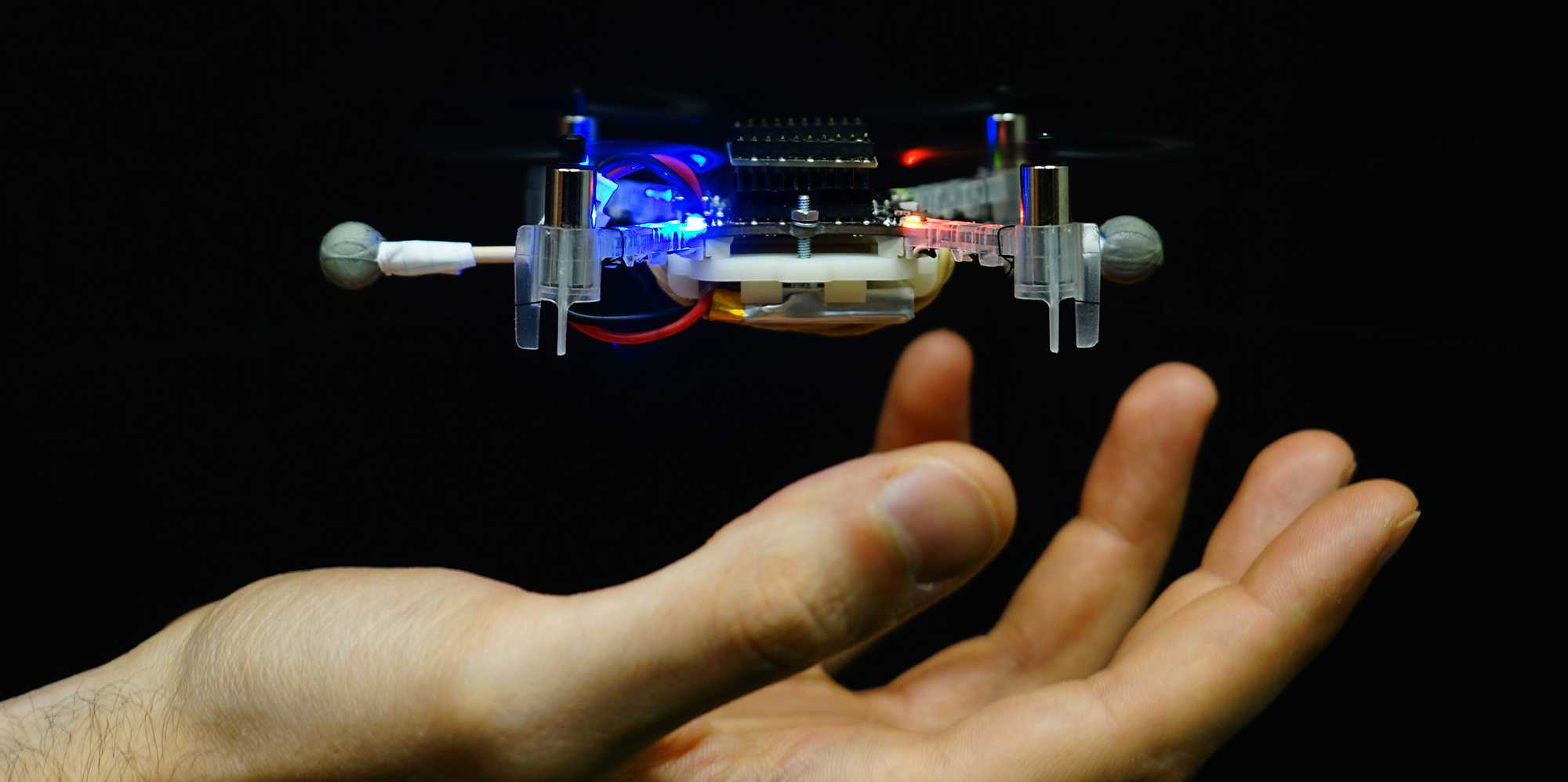
My work focuses on finding new limits in the intersection of machine learning and optimal control applied to super agile autonomous quadrotor flight under the supervision of Prof. Davide Scaramuzza.