Hi, I'm Angel Romero Aguilar
I am a robot learning researcher working on embodied intelligence for agile autonomous systems.
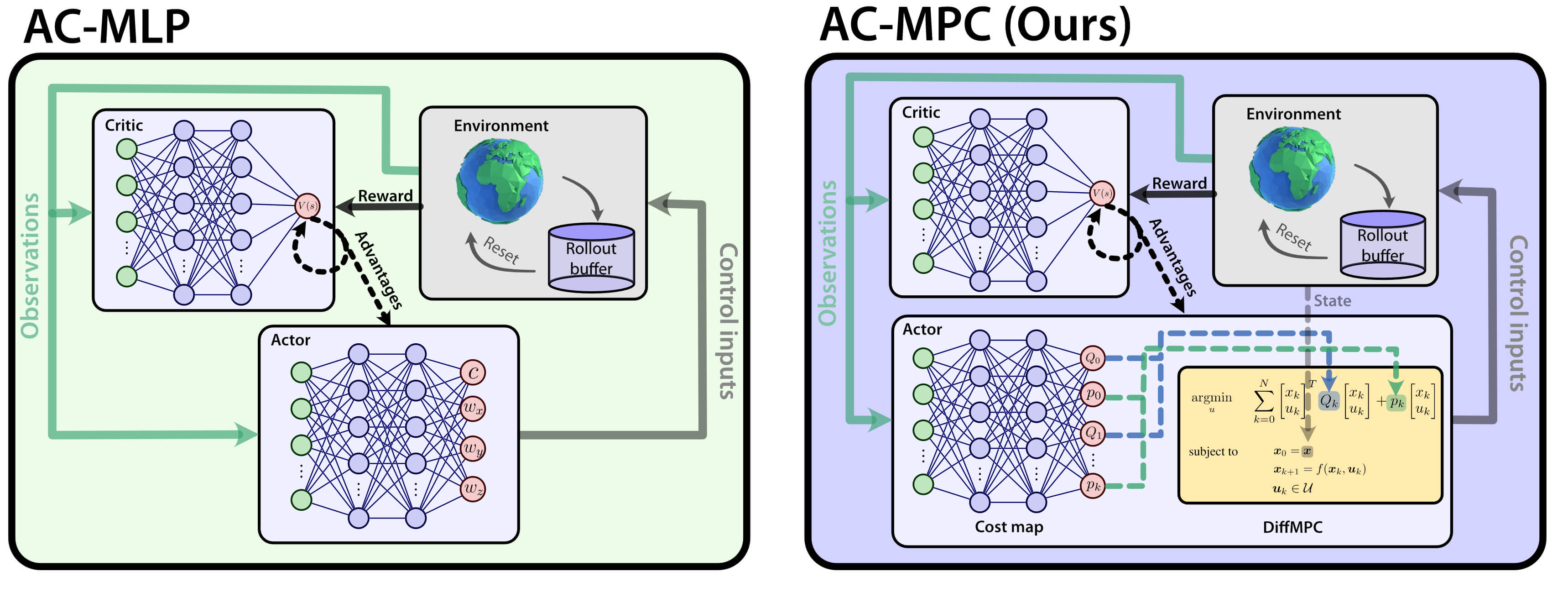
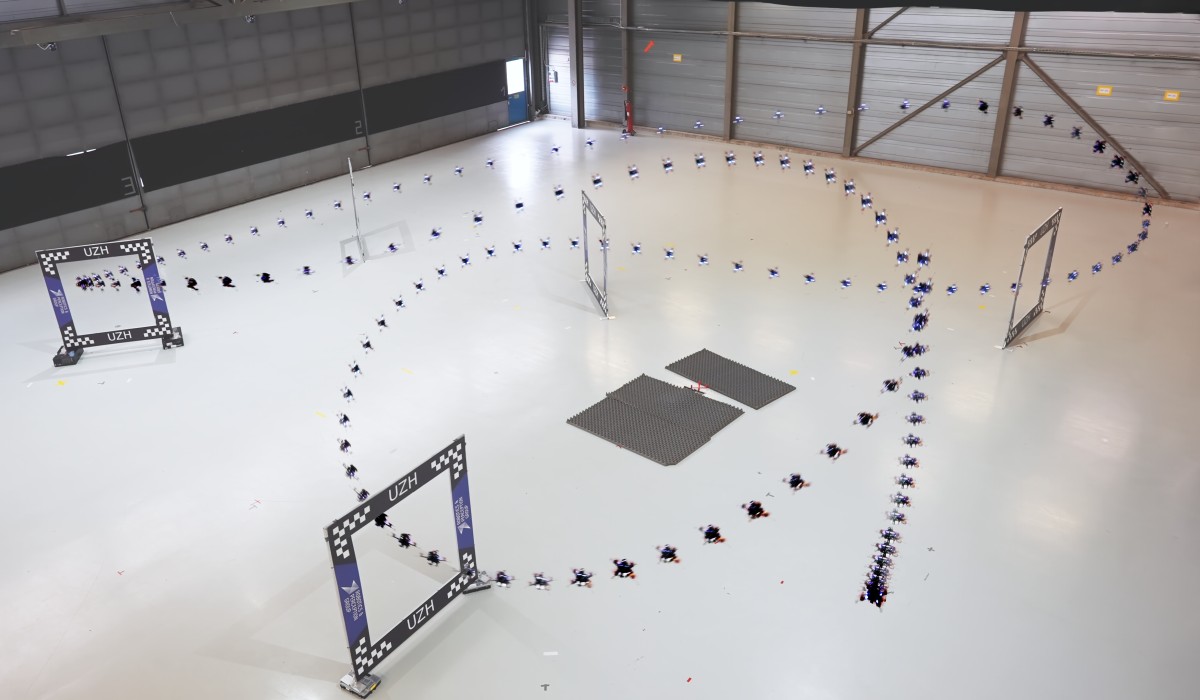
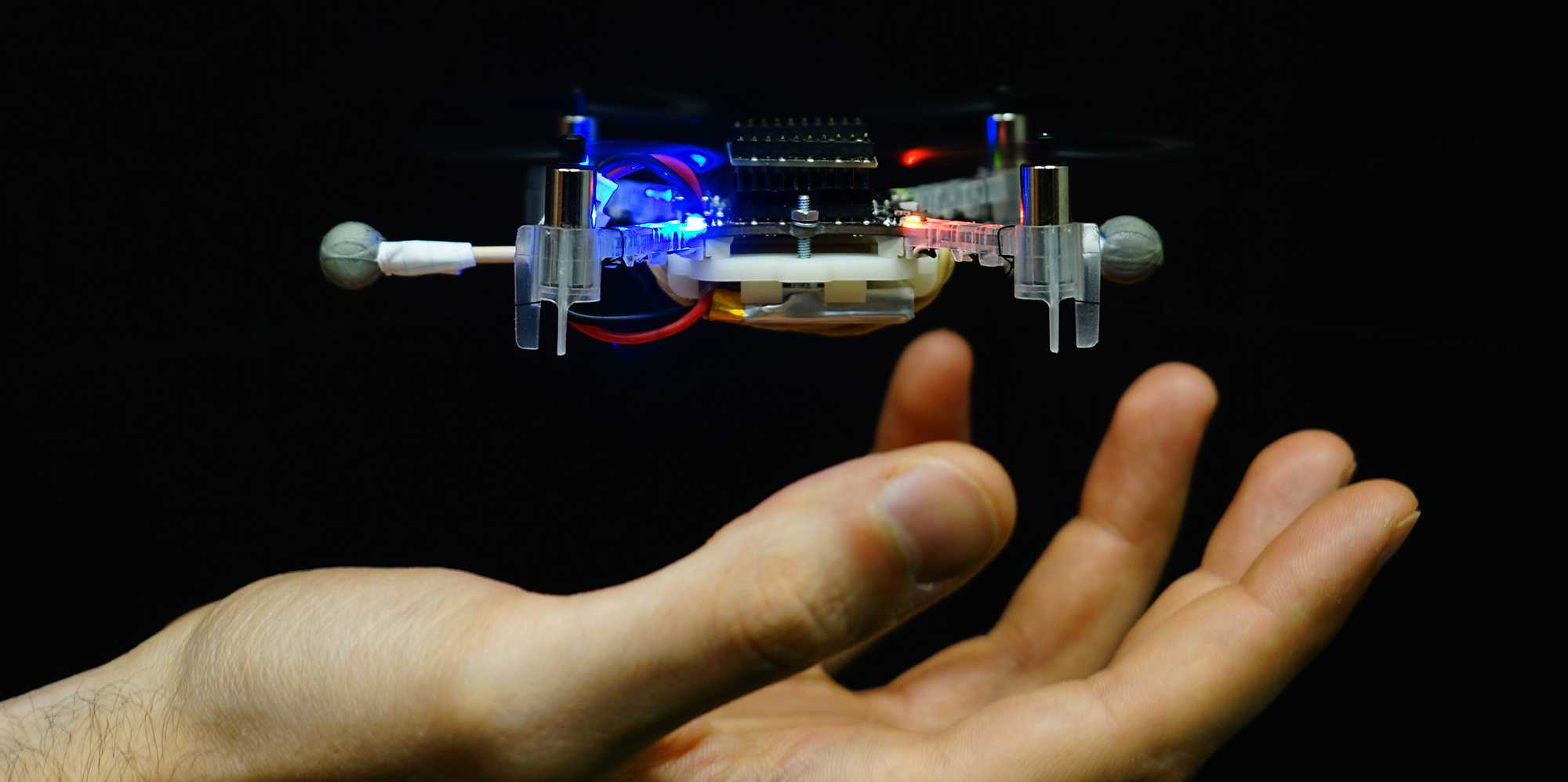
My research sits at the intersection of machine learning, robotics, and optimal control: learning agents that run in real time, generalize across conditions, and transfer from simulation to the real world. I have developed and deployed these methods on agile autonomous drones, among the most demanding testbeds for real-time control, perception, and sim-to-real transfer.
Research interests:
- Reinforcement learning & optimal control
- World models
- Sim-to-real transfer
- Policy learning for embodied agents
- Perception-to-action
- Agile robotics
I completed my PhD in 2026 at the Institute of Informatics, University of Zurich, advised by Prof. Davide Scaramuzza.